Model-based Reinforcement Learning
Overview
Final piece: learn a “world model”, plan through it, and fold epistemic uncertainty into exploration and safety.

Outer loop recap
- Collect experience with current policy \(\pi\) (real environment).
- Learn dynamics \(f_\theta(x,a)\approx p(x'\mid x,a)\) and reward model \(r_\theta(x,a)\) (a.k.a. world model).
- Plan/improve policy using the learned model (MPC, trajectory optimization, policy optimization in imagination).
- Repeat until convergence or performance threshold.
Reuses familiar value-learning machinery while adding model learning + planning; key benefit is sample efficiency and optional safety analysis.
Planning with the learned model

Deterministic dynamics
- MPC / receding-horizon control: choose horizon \(H\), optimize action sequence \(a_{t:t+H-1}\), apply first action, replan next step.
- Objective with terminal bootstrap (Eq. 13.2): \[J_H(a_{t:t+H-1}) = \sum_{\tau=t}^{t+H-1}\gamma^{\tau-t} r(x_\tau,a_\tau) + \gamma^H V(x_{t+H}).\]
- Optimization tools: shooting (random sampling), gradient-based (backprop through dynamics), cross-entropy method (CEM) which iteratively reweights samples toward high-return elites.
- Special case \(H=1\) recovers the greedy policy from dynamic programming.
Stochastic dynamics
- Trajectory sampling / Stochastic Average Approximation: simulate multiple rollouts under candidate action sequence, average returns. Use reparameterization trick to express stochastic dynamics as \(x_{t+1}=g(x_t,a_t;\varepsilon_t)\) for Monte Carlo gradients.
- Always replan to mitigate model error accumulation; keep horizon short (5–30 steps) to balance foresight and compounding error.
Learning world models
- Deterministic regressors: neural nets, RFF-based GPs, latent linear models.
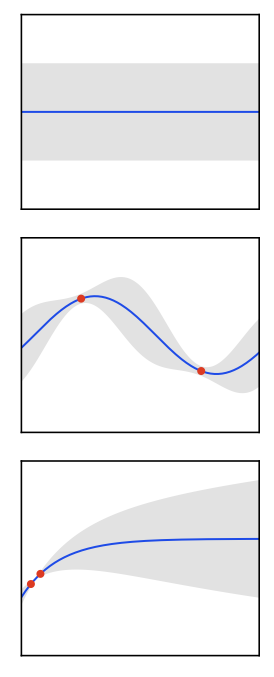
- Probabilistic dynamics: output distribution over next state (e.g., Gaussian with mean/cov). Distinguish aleatoric \(\mathcal{B}(x_{t+1}\mid f,x_t,a_t)\) vs epistemic \(p(f\mid \mathcal{D})\) uncertainty.
- Ensembles / BNNs: maintain multiple models \(\{f^{(k)}\}\) (bootstrapped, variational) to approximate epistemic distribution. Used heavily in PETS.
- Latent SSMs: PlaNet, Dreamer learn stochastic latent dynamics via variational inference (ELBO). Planner operates in latent space; Dreamer also learns actor/critic in imagination (backprop through latent rollouts).
Planning under epistemic uncertainty
- For each sampled model \(f^{(k)}\), perform standard planning (respect aleatoric noise) then average returns/gradients across \(k\). Provides robustness by marginalizing over epistemic uncertainty.
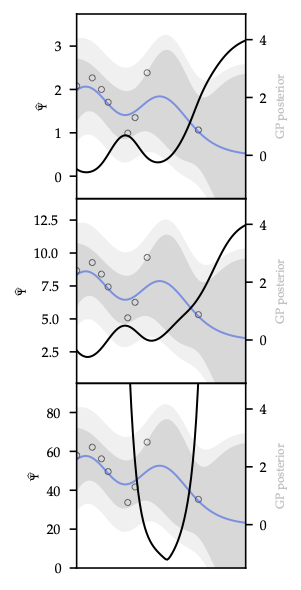
- PETS: ensemble of probabilistic networks + MPC via CEM. Handles both uncertainty types; strong sample efficiency on MuJoCo, etc., and the plot below visualizes how epistemic variance concentrates near unexplored regions along candidate plans.
- Dreamer/PlaNet: optimize policy/value inside learned latent world; generate imagined rollouts to train actor-critic via policy gradient.
Exploration strategies
- Thompson sampling: draw one model sample, plan greedily. Randomizing over models encourages exploration of uncertain regions.
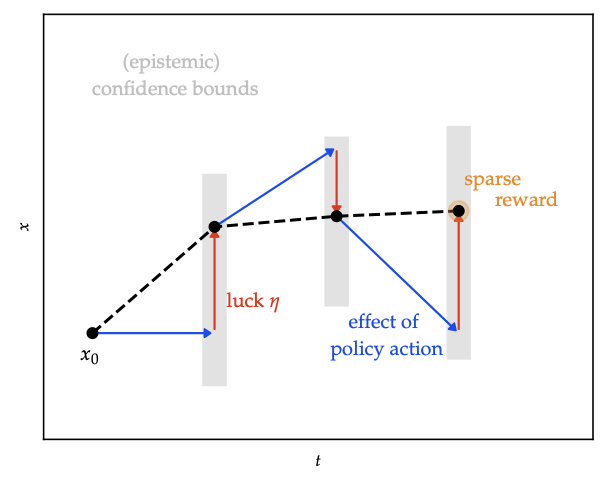
- Optimism: introduce “luck” variables \(\eta\) to allow transitions within confidence bounds that favour high reward; ensures optimistic value estimates until uncertainty shrinks.
- Information-directed sampling: weigh squared regret vs information gain; the heatmap illustrates the ratio used to pick the next rollout.
- Safe exploration: propagate uncertainty to enforce chance constraints or reachable sets; combine with MPC for high-probability safety.
Bridging back to model-free methods
- Use world model to generate synthetic data for TD/Q/actor-critic (Dyna style).
- Terminal value \(V\) in MPC learned via TD or deep critics.
- Planning horizon \(H=1\) reduces to model-free greedy; longer horizons add foresight absent in purely value-based methods.
Practical heuristics
- Short horizons + frequent replanning mitigate model error; warm-start optimization from previous solution.
- Keep track of epistemic uncertainty (ensembles, Bayesian nets) to decide when additional real data is needed.
- Use CEM or evolutionary strategies as robust default for optimizing action sequences.
Safety & guarantees
- Confidence sets on dynamics ⇒ safe reachable tubes; combine with MPC to keep agent within safe set despite model error.
- Optimistic-yet-safe planners mix optimism (exploration) with reachable-set constraints; HUCRL timeline highlights confidence widening when the agent strays outside proven-safe regions.
- Sets stage for constrained RL and control-barrier approaches.