Fundamentals of Inference
Overview
Bedrock for everything else: probability spaces, conditioning, and information measures. Later chapters reuse these definitions verbatim.
Probability spaces and viewpoints
- Probability space \((\Omega,\mathcal{A},\mathbb{P})\): outcome space, \(\sigma\)-algebra, and measure with \(\mathbb{P}(\Omega)=1\); Borel \(\sigma\)-algebra for \(\mathbb{R}^d\).
- Frequentist view: \(\Pr[A]=\lim_{N\to\infty}\frac{1}{N}\sum_{i=1}^N\mathbf{1}\{A\text{ occurs in trial }i\}\) when IID replicates exist.
- Bayesian view: \(\Pr[A]\) encodes coherent belief; Dutch-book coherence ⇒ Kolmogorov axioms. Prior/posterior updates by Bayes’ rule.
Random variables and transformations
- Measurable map \(X:(\Omega,\mathcal{A})\to(\mathcal{X},\mathcal{B})\) pushes forward \(\mathbb{P}\) to \(P_X\).
- Discrete: PMF \(p_X(x)=\Pr[X=x]\), CDF \(F_X(x)=\Pr[X\le x]\).
- Continuous: PDF \(p_X\) with \(\Pr[X\in S]=\int_S p_X(x)\,dx\).
- Support \(\text{supp}(p)=\{x:p(x)>0\}\) is crucial for conditioning (e.g., KL terms later).
- Change of variables: for invertible \(g\) with Jacobian \(J\), \(p_Y(y)=p_X(g^{-1}(y))\left|\det J_{g^{-1}}(y)\right|\).
Conditioning identities
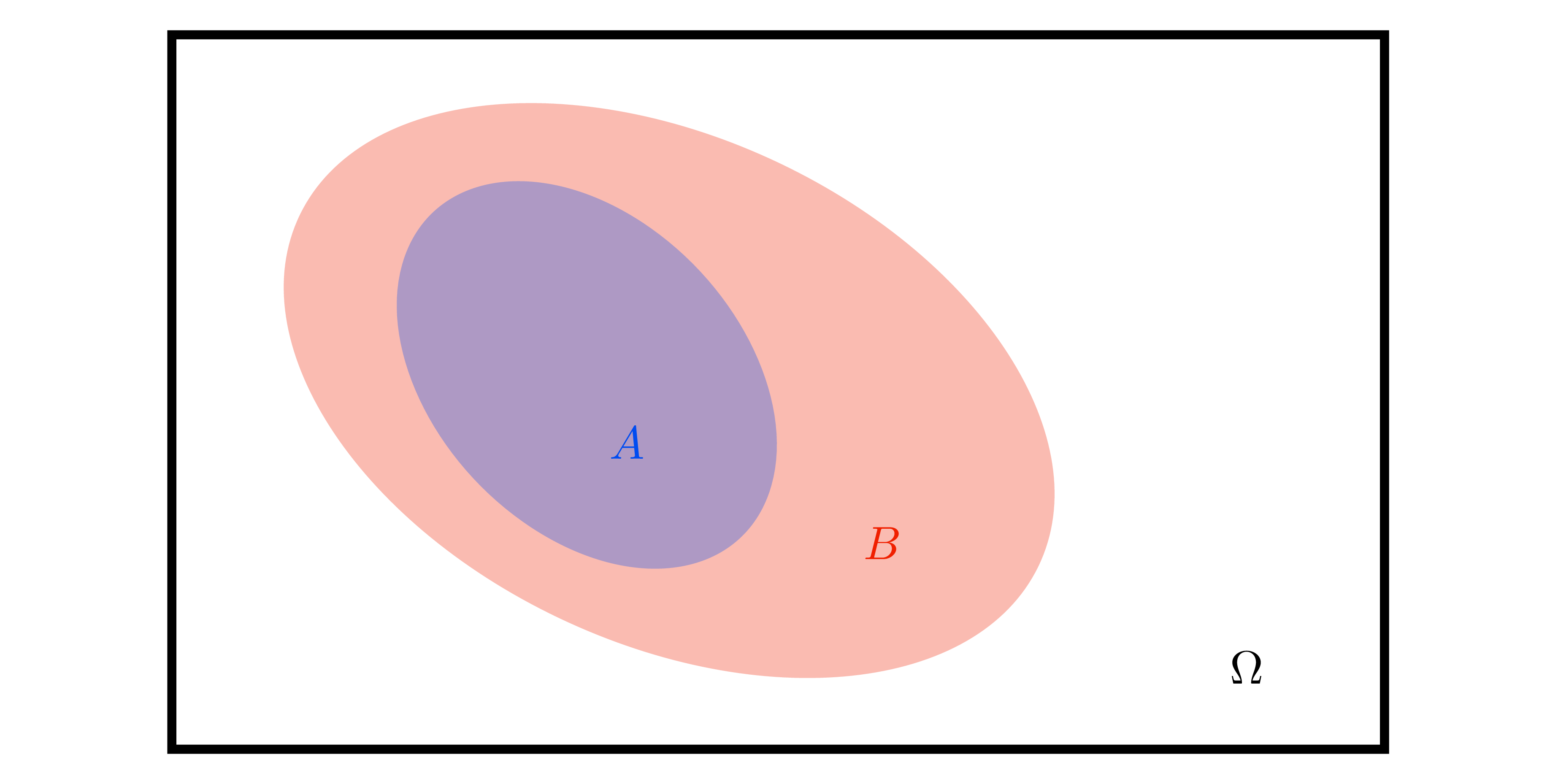
- Product rule: \(\Pr[A,B]=\Pr[A\mid B]\Pr[B]\).
- Law of total probability: \(\Pr[A]=\sum_i\Pr[A\mid B_i]\Pr[B_i]\) or \(\int \Pr[A\mid b]p_B(b)db\).
- Bayes’ rule: \(\Pr[B\mid A]=\frac{\Pr[A\mid B]\Pr[B]}{\Pr[A]}\); density form \(p_{X\mid Y}(x\mid y)=p_{X,Y}(x,y)/p_Y(y)\).
- Tower property: \(\mathbb{E}[X]=\mathbb{E}_Y[\mathbb{E}[X\mid Y]]\); used repeatedly in variance decompositions and TD learning.
Expectations, variance, covariance
- Expectation linear; Jensen: convex \(g\) ⇒ \(g(\mathbb{E}[X])\le\mathbb{E}[g(X)]\) (applied in KL bounds, ELBO derivations).
- Variance: \(\operatorname{Var}[X]=\mathbb{E}[X^2]-\mathbb{E}[X]^2\); covariance matrix \(\Sigma_X=\mathbb{E}[(X-\mathbb{E}X)(X-\mathbb{E}X)^\top]\) PSD.
- Linear maps: \(\operatorname{Var}[AX+b]=A\operatorname{Var}[X]A^\top\); Schur complement yields conditional covariance (used in GP conditioning, Kalman filters).
- Law of total variance: \(\operatorname{Var}[X]=\mathbb{E}_Y[\operatorname{Var}[X\mid Y]]+\operatorname{Var}_Y(\mathbb{E}[X\mid Y])\) ⇒ interprets aleatoric vs epistemic uncertainty.
Independence notions
- \(X\perp Y\) iff joint factorizes; conditional independence \(X\perp Y\mid Z\) iff \(p(x,y\mid z)=p(x\mid z)p(y\mid z)\).
- Pairwise independence ≠ mutual independence; counterexamples show up in mixture models.
- Gaussian special case: zero covariance ⇔ independence.
Multivariate Gaussian essentials
- PDF: \(\mathcal{N}(x\mid\mu,\Sigma)\) with determinant and quadratic form.
- Affine invariance: \(AX+b\sim\mathcal{N}(A\mu+b, A\Sigma A^\top)\).
- Sampling: \(x=\mu+L\xi\), \(\xi\sim\mathcal{N}(0,I)\) (
Choleskyor spectral) — reused for GP sampling, latent variable models. - Conditioning on block partitions: \[X_A\mid X_B=b \sim \mathcal{N}(\mu_A + \Sigma_{AB}\Sigma_{BB}^{-1}(b-\mu_B),\; \Sigma_{AA}-\Sigma_{AB}\Sigma_{BB}^{-1}\Sigma_{BA}).\] Schur complement PSD ⇒ conditioning never increases variance (core to GP posterior, Kalman updates).
Parameter estimation summary
- Likelihood \(p(\mathcal{D}\mid\theta)=\prod_i p(y_i\mid x_i,\theta)\); MLE solves \(\max_\theta \ell(\theta)=\sum_i \log p(y_i\mid x_i,\theta)\).
- MAP adds prior \(\log p(\theta)\); recovers ridge/lasso when using quadratic penalties.
- Bayesian predictive: \(p(y^*\mid x^*,\mathcal{D})=\int p(y^*\mid x^*,\theta)p(\theta\mid\mathcal{D})d\theta\); motivates maintaining posterior rather than point estimates.
Information-theoretic quantities
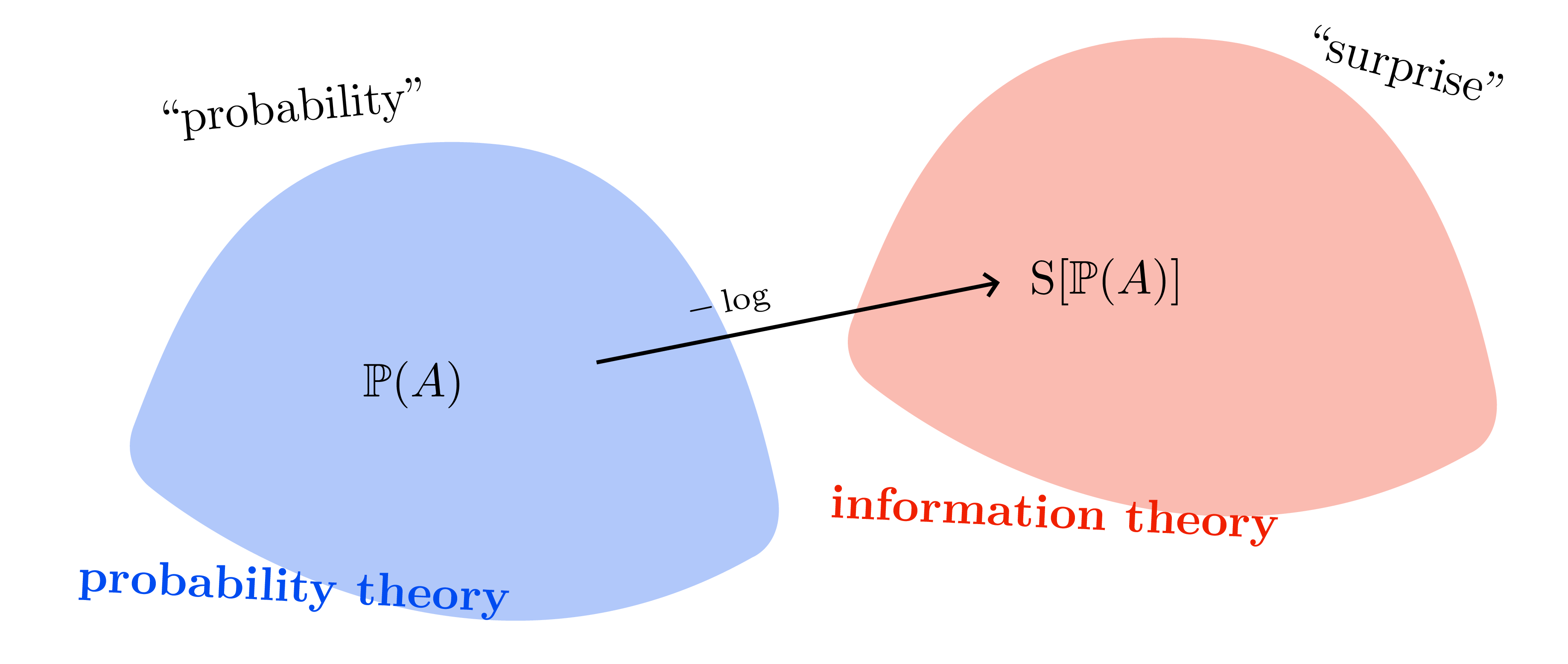
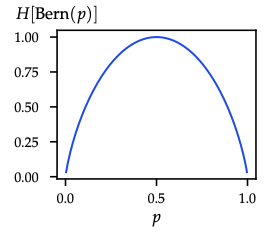
- Surprise \(\mathcal{S}(u)=-\log u\); entropy \(H(p)=\mathbb{E}_p[-\log p(X)]\) measures average surprise.
- Cross-entropy \(H(p,q)=\mathbb{E}_p[-\log q(X)]\).
- KL divergence \(\mathrm{KL}(p\|q)=\mathbb{E}_p\big[\log\frac{p}{q}\big]\ge0\); forward KL is mode-covering, reverse KL is mode-seeking.
- Mutual information \(I(X;Y)=H(X)-H(X\mid Y)\) underlies active learning, Bayesian optimization, and exploration bonuses.
Keep this sheet handy: every later derivation (Bayesian linear regression, VI, Kalman filtering, GP conditioning, RL entropy bonuses) is a remix of these identities.